首发于 飞控
切换模式
旋转矩阵的一些理解

咚咚
向着巨人的肩膀前进。
最近翻看飞控和导航的书发现,在有关飞控的书中导航系到机体系旋转矩阵多为:
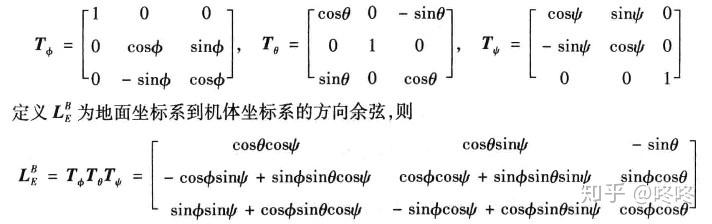

导航书中多为:
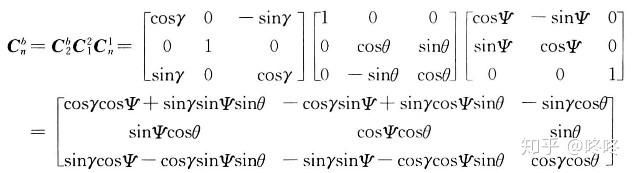

主要原因在于它们所选择的坐标系不同,在控制中选择的坐标系多是北东地和前右下,而且大部分飞控程序中用的是飞控这一套旋转矩阵,而导航中多选用东北天和右前上。
尽管旋转矩阵不同,但它们的旋转顺序都是先偏航,然后俯仰,最后滚转,其原因在前面的文章中也提到过:旋转矩阵对应的是欧拉角,这种旋转顺序是为了让欧拉角跟姿态角对应起来。
因此使用欧拉角旋转矩阵进行姿态解算和姿态更新时一定要根据所选用的坐标系选择相应的旋转矩阵。四元数则不存在这个问题,因为它本身就可以表示旋转,而n系到b系的一次性旋转实际上就一个,因此四元数旋转矩阵是唯一的。
编辑于 2018-07-15 18:47
姿态解算
导航
飞行控制
文章被以下专栏收录
