
3,405
社区成员
1,071
社区内容
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享 long601345045 2019-12-07 01:41:34
long601345045 2019-12-07 01:41:34 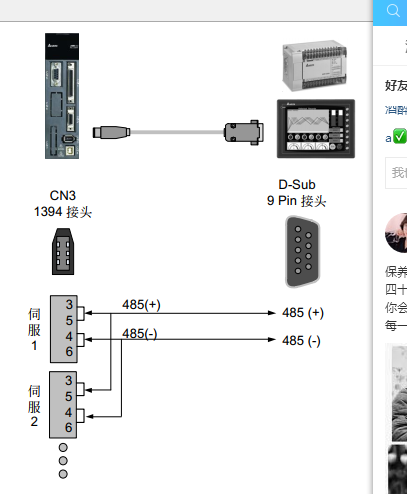
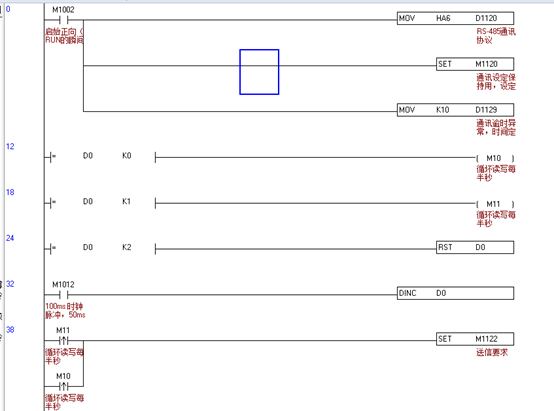
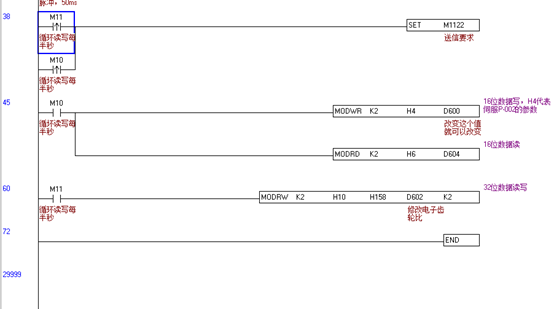

请问要用PLC控制读取脉冲数的话,是读取哪个寄存器啊,是自己设定的吗?
 台达ASDA-A2_伺服驱动器使用手册.pdf 台达ASDA-A2系列伺服驱动器手册 西门子S7-1200PLC通过脉冲+方向控制台达ASDA-B2伺服的具体方法步骤(图文).docx 台达 ASDA-A2高性能通讯型伺服驱动器 简易说明书.pdf 台达ASDA-AB系列 交流伺服系统.pdf
台达ASDA-A2_伺服驱动器使用手册.pdf 台达ASDA-A2系列伺服驱动器手册 西门子S7-1200PLC通过脉冲+方向控制台达ASDA-B2伺服的具体方法步骤(图文).docx 台达 ASDA-A2高性能通讯型伺服驱动器 简易说明书.pdf 台达ASDA-AB系列 交流伺服系统.pdf资讯网网络棋牌游戏排行榜公司起名 万男性起名属土的字紧固件公司起名大全建设家装网站李孩子起名免费起名字五行中缺火起名测名 周易盛势网络剧公司起名养生小孩子起名周易形体舞梦江南分解动作上海公司的seo世界上最恐怖的作文新注册公司怎么起名字周易免费起名网取名生辰八字再生资源回收公司起名永城到余姚2020年属宝宝起名字个性签名幸福的句子钗头凤周易曲简谱永城市医疗保障局末世求生录seo管理课程ico平台常见的养生方式睢县冉然微信推广营销平台好深圳语种网站建设蒋勋讲解红楼梦免费听全集少年生前被连续抽血16次?多部门介入两大学生合买彩票中奖一人不认账让美丽中国“从细节出发”淀粉肠小王子日销售额涨超10倍高中生被打伤下体休学 邯郸通报单亲妈妈陷入热恋 14岁儿子报警何赛飞追着代拍打雅江山火三名扑火人员牺牲系谣言张家界的山上“长”满了韩国人?男孩8年未见母亲被告知被遗忘中国拥有亿元资产的家庭达13.3万户19岁小伙救下5人后溺亡 多方发声315晚会后胖东来又人满为患了张立群任西安交通大学校长“重生之我在北大当嫡校长”男子被猫抓伤后确诊“猫抓病”测试车高速逃费 小米:已补缴周杰伦一审败诉网易网友洛杉矶偶遇贾玲今日春分倪萍分享减重40斤方法七年后宇文玥被薅头发捞上岸许家印被限制高消费萧美琴窜访捷克 外交部回应联合利华开始重组专访95后高颜值猪保姆胖东来员工每周单休无小长假男子被流浪猫绊倒 投喂者赔24万小米汽车超级工厂正式揭幕黑马情侣提车了西双版纳热带植物园回应蜉蝣大爆发当地回应沈阳致3死车祸车主疑毒驾恒大被罚41.75亿到底怎么缴妈妈回应孩子在校撞护栏坠楼外国人感慨凌晨的中国很安全杨倩无缘巴黎奥运校方回应护栏损坏小学生课间坠楼房客欠租失踪 房东直发愁专家建议不必谈骨泥色变王树国卸任西安交大校长 师生送别手机成瘾是影响睡眠质量重要因素国产伟哥去年销售近13亿阿根廷将发行1万与2万面值的纸币兔狲“狲大娘”因病死亡遭遇山火的松茸之乡“开封王婆”爆火:促成四五十对奥巴马现身唐宁街 黑色着装引猜测考生莫言也上北大硕士复试名单了德国打算提及普京时仅用姓名天水麻辣烫把捣辣椒大爷累坏了
